Object Detection Challenge Under Low-light Surveillance
Description
Object detection at nighttime is a crucial and frontier problem in surveillance, but has not been well explored by the computer vision and artificial intelligence communities. Most of existing methods detect object under favorable lighting conditions (daytime) and achieve promising performances. In contrast, they often fail under unstable lighting conditions (nighttime). Night is a critical time for criminal suspects object (pedestrian or car) to act in the field of security. The existing nighttime object detection dataset is captured by a car camera, specially designed for autonomous driving scenarios. The dataset for nighttime surveillance scenario is still vacant. There are vast differences between autonomous driving and surveillance, including viewpoint and illumination. In this challenge, we build a novel object detection dataset from the nighttime surveillance aspect: Object Detection under Low-light Surveillance (ODLS). We collected 100G data from cameras in the real campus surveillance, where resolution of image is 1920X1080. The recordings were collected from 37 cameras during a period of 17:00 to 23:00. The number of frames in ODLS is 100k. The number of annotated bounding boxes is approximate 500k. The average number of objects per frame in ODLS is 5.7.
The ODLS has been divided into three parts:
training set (60%),
validation set (10%) and
test set (30%).
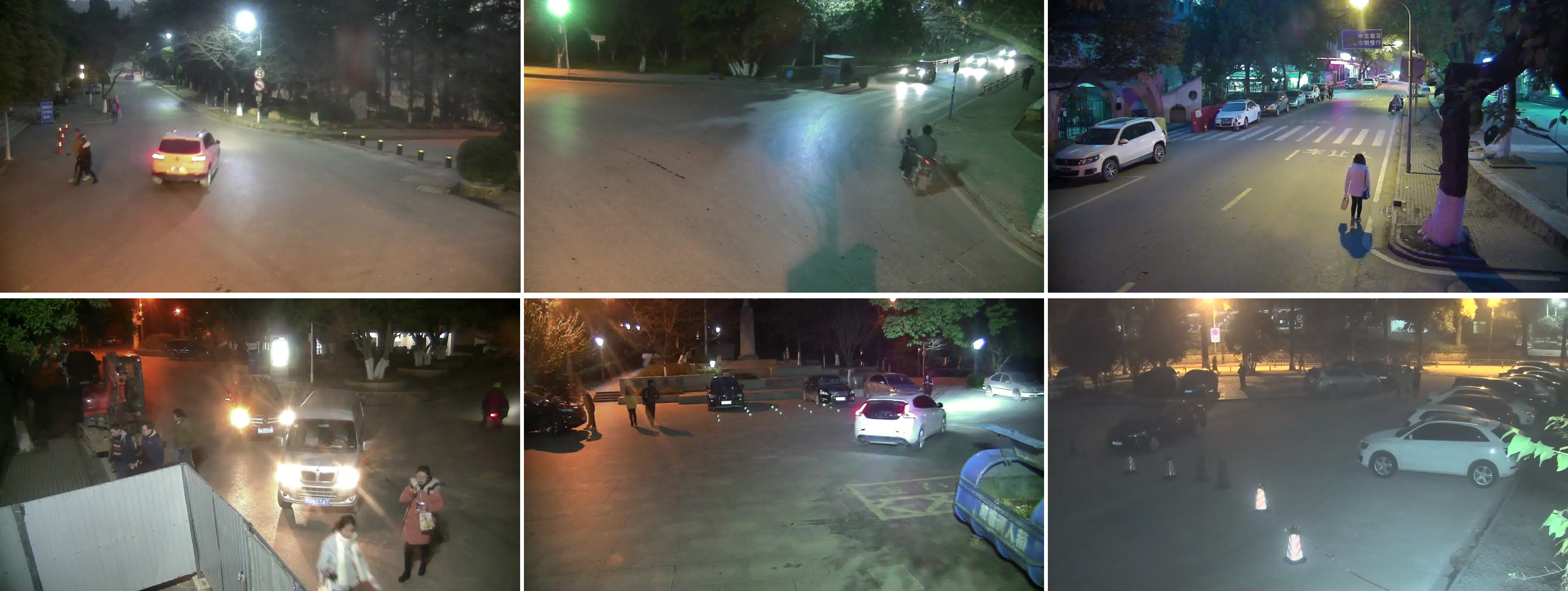
Illustrative examples of ODLS dataset:
Evaluation
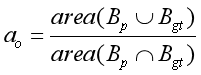
The principal quantitative measure used will be the mean average precision (MAP). Example code for computing the precision/recall and AP measure is provided in the development kit. Detections are considered true or false positives based on the area of overlap with ground truth bounding boxes. To be considered a correct detection,
the area of overlap  between the predicted bounding box
between the predicted bounding box  and ground truth bounding box
and ground truth bounding box  must exceed 70% by the formula.
must exceed 70% by the formula.
between the predicted bounding box
and ground truth bounding box
must exceed 70% by the formula.
Submission and Feedback
You can submit the results directly to WorkshopCV01@gmail.com. The maximum number of submissions per day is three. The evaluation results will be published on the website the next day. Each detection is represented by a element. The order of detections is not important.
An example detection is shown here: 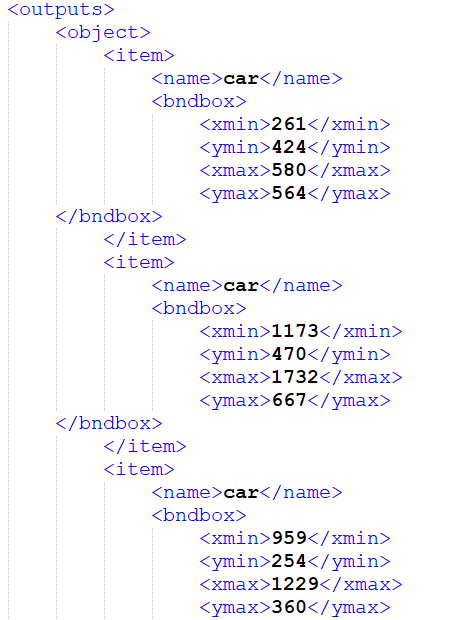
Evaluation results
| Top | mAP | Team |
| 1 | 68.94% | WUST-Luminous |
| 2 | 44.48% | HUST&WUST |
| 3 | ||
| ... |
Contact us
If you have any questions about this challenge, please contact us WorkshopCV01@gmail.com.